





Не так давно вышла обновленная 3 версия шилда созданного для ардуино, предназначеная для управления шаговыми двигателями и сервомоторами. в дальнейшем мы опишем и про ардуино и про возможности применения данного устройства без него.
советуем заказывать с ebay.. выходит в 10ки раз дешевле любого интернет магазина России
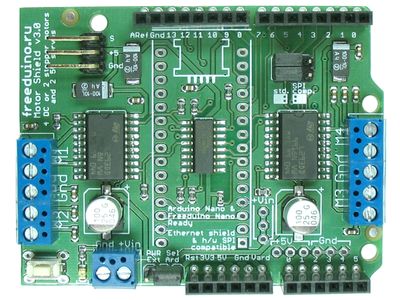
Motor Shield (далее M–Shield) – силовой модуль управления двигателями для микроконтроллеров серии Freeduino/Arduino. Модуль предназначен для упрощения разработки моторизированных и робототехнических устройств и основан на первой версии M–Shield от Adafruit Industries (www.ladyada.net).
Модуль существует в двух версиях: v2 со штыревыми компонентами, и пришедшая ей на замену v3 с поверхностным монтажом компонентов и дополнительным функционалом.
Модуль подключается к Freeduino с помощью установленных на нем разъемов.
Технические возможности M–Shield позволяют реализовать разнообразные проекты, связанные с подключением и управлением слаботочными двигателями следующих типов:
- четырёх двигателей постоянного тока (ДПТ - DC motors);
- двух шаговых двигателей униполярных или биполярных с одинарной или двойной обмоткой (ШД - stepper motors);
- двух 5В сервоприводов (СП - servos).
Возможны следующие комбинации подключаемых к M–shield двигателей:
- 2 СП + 4 ДПТ;
- 2 СП + 2 ШД;
- 2 СП + комбинации ШД и ДПТ, например: возможен вариант замены 1 ШД на 2 ДПТ или наоборот.
Технические характеристики
- напряжение питания: +7...+ 24 В;
- количество силовых каналов: 4;
- максимально-продолжительный ток каждого канала: 0,6 А;
- напряжение питания сервоприводов: 5 В;
- возможность реверса каждого двигателя;
- возможность независимого управления каждым каналом;




